- Remote Bin Readouts in Limekiln Operation
  
The off-road truck shuttles from the output screens and hoppers at a limekiln to the storage piles for the various sized rocks produced. Rocks are continuously produced and stored in 5 hoppers. The hoppers fill at varying rates and can shut the kiln down if they overfill. The truck driver had no easy way to know which bin was filling.
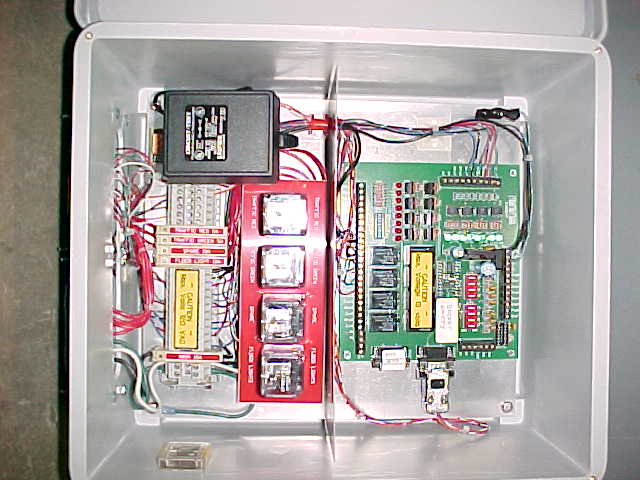
The analog values of the bin levels were captured from the existing PLC and continuously transmitted via a short range, license-free data radio. See picture on the right.
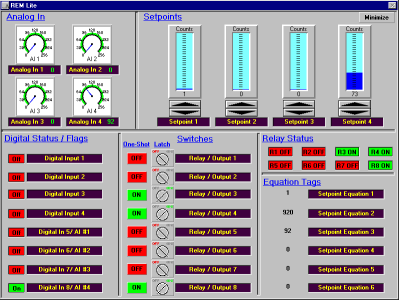
In the truck, a second radio received the analog values and displayed them on small graphical display. The screen is updated continuously anytime the truck is within 200 - 300 meters of the bins. Now, a quick glance at the display as he approaches the bins allows the driver to choose the fullest bin. See the center picture.
While under the bins, the driver can open the bin doors and fill his truck by simultaneously holding the red button and operating one of the toggle switches.
To meet federal government standards for an Automated, Unattended, Legal-for-Trade vehicle scale, some extra control circuits are needed. These do several things such as automatically zeroing the scale before a vehicle drives on, making sure the whole vehicle is on the scale during the transaction, monitoring and controlling the data flow from the weight indicator and processing computer system and making sure only one load-slip gets issued per transaction.
This system is built around the Stamp BS2 controller from Parallax and our own EnT general purpose I/O board.

- Operator Interface Solutions
Many microcontroller projects can benefit from a PC-base operator interface. Shown below is the REM Lite package from Advance Monitoring Technologies. It is designed specifically for the EnT board and uses a serial interface. Besides graphical displays, it allows equations to be entered to allow logic to be changed without rewriting the microcontroller program.
- Remotely Operated Research Vessel
The controls for this 1.5 meter ( 6 foot) catamaran include radio controls for the propulsion system, operation of the GPS, sonar for the depth, specialized instrumentation packages for water sampling and real-time monitoring.
Controls when in air-drive mode includes twin electric two-speed motors which operate in a differential mode to both power and steer the boat. When operating in waters without floating debris, the air drives can be replaced with an electric trolling motor with servo steering.
Remotely controlled from shore, the machine can be deployed about 1 km away and the data appears in real-time at the operators laptop. As well, a wireless video link can also be used simultaneously.
Natech Environmental Services uses the machine to survey municipal sewage lagoons to determine how much and where dredging is required. The depth data is plotted with GPS coordinates on a color-coded site-drawing which is given to the client.
Stamp BS2 and BS2sx micro controllers are used in the controls for everthing from controlling the motors, operating the instrument winches and processing all the serial data from the instruments and sending it out the data radio links.

The electronics are mounted inside the black water-tight box. Just visible on the top is the white GPS active antenna for the Lowrance GPS/Sonar.
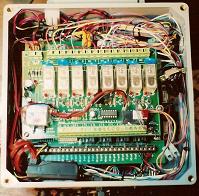 
The electronic controls include 2 of our EnT Stamp controller boards, as shown on the Home page. One, with a BS2sx chip handles all serial communication, and one with a BS2 chip which is dedicated to receiving the R/C signals and controlling the propulsion and winches.
In the left picture above, the upper board is a Velleman serial controlled relay card which operates the 8-bottle water sampling system which was custom built for this project.
The right view shows some of the water-tight connectors used in the project.
- Marine Railway Control System
  
This 1900 Tonne marine railway used a winch powered by a custom-built 125 HP electric motor. The motor became unrepairable after many years' service.
It was decided to replace the electric system with twin marine diesels which each drove an electrically controlled hydraulic pump. A multi-piston hydraulic motor replaced electric motor to pull the main chain. (see middle photo).
To control the pumps and thereby the winching up of the ship, a Basic Stamp was used to generate a proportional signal to vary the flow of the hydraulic oil. By pushing the buttons on the console, the operator varies the winching speed smoothly from full reverse to full forward.
- Tree Processor Controller
 
Known as a processor head, the equipment mounted on the excavator in the picture is used to de-limb and and cut-length trees while still in the forest. This leaves much of the biomass on the forest floor.
The computer system includes a Toshiba PLC which provides the operator a way to select log length, display the operating parameters and to otherwise control the head.
As the log approaches the desired length, the PLC takes over control of the excavator hydraulic system and precisely stops the log under a hydraulically driven chain saw. It will cut through a 12 inch log in little more than a second.
Over 120 systems are operating in Canada. A version was also built based on the Basic Stamp BS2. A new touchscreen controller by CUBLOC is being tested. A video is available on Youtube, search "stamptrol1".
|